Технология АЗН-В позволила выполнить контролируемые полеты в ограниченном пространстве одновременно нескольким беспилотникам и самолету АН-2 показав, каким будет будущее беспилотной авиации при использовании общего с пилотируемой авиацией воздушного пространства.

Весь мир давно и отчетливо понимает, без технического решения задачи совместных полетов беспилотных и пилотируемых ВС масштабного развития рынка БАС не будет.
Над решением вопроса интеграции БАС в общее воздушное пространство трудятся многие государства, опираясь на сертифицированные в авиации технологии, а также пробуя новые технические решения, в частности, возможности перспективного стандарта связи 5G.
Периодически можно слышать заявления о внедрении неких новых решений по организации совместных полетов БВС и ПВС, однако в полной мере возникающие при совместных полетах задачи не решены нигде в мире.

Рассмотрим, например, технологию AirSence, анонсированную компанией DJI.
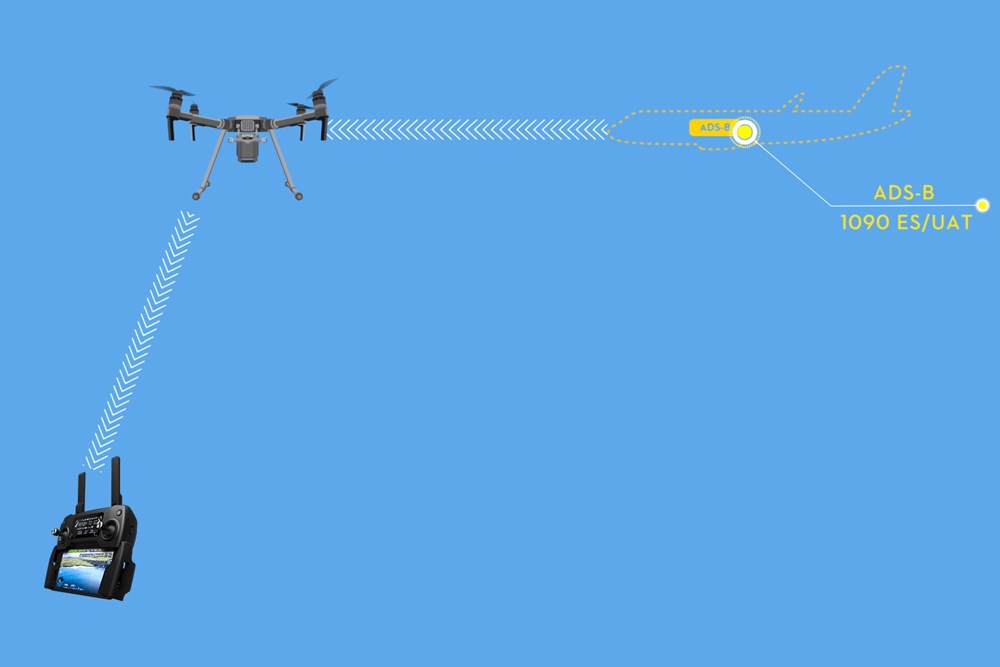
Суть решения в оснащении БВС блоком, работающим только на прием сигнала АЗН-В «IN» стандарта 1090ES или стандарта UAT.
Обнаруживая сигнал от пилотируемого ВС, бортовое оборудование передает информацию по линии С2 на станцию внешнего пилота, который и должен совершить маневр уклонения.
Решение выглядит очень скромным, поскольку обеспечивает одну малую задачу – внешний пилот видит пролетающий в небе лайнер, оснащенный оборудованием АЗН-В «OUT» стандарта 1090ES, но пилот такого лайнера никого сам не видит. Кроме того, внешний пилот такого БВС не видит другие БВС.
Учитывая, что основная высота полетов коммерческих БВС редко превышает 500 м, а большинство низколетящих самолетов АОН и сверхлегких ВС не оснащены оборудованием АЗН-В, информация о лайнерах для внешнего пилота сравнима с индикацией звезд в космосе, до которых, теоретически, тоже можно достать.
Но даже если бы низколетящее пилотируемое воздушное судно и было оснащено оборудованием АЗН-В «OUT» 1090, то пилот такого ПВС все равно не смог бы увидеть летящий на него БВС, поскольку информация идет только в одну сторону.
Для взаимодействия с низколетящими пилотируемыми воздушными судами DJI планирует использовать другой стандарт UAT, применяемый для этих целей в качестве регионального решения в США, но не принятый к внедрению в Европе и всех странах, входящих в Европейскую зону ИКАО, включая Россию.
в 2018 году, еще раньше, чем DJI, похожее двухстандартное решение было предложено американской компанией uAvionix, однако ряд объективных недостатков не дали ему развития.
Одна из главных причин - эффект насыщения линии 1090ES, при котором происходит наложение и искажение сигнала от нескольких воздушных судов, т.е. работает такое устройство только при встрече с небольшим количеством ВС, но может давать большие ошибки в насыщенном потоке.
Кроме того, чтобы "видеть" другие воздушные суда в устройстве должна быть функция АЗН-В («IN»), однако ни программа NextGen, ни Sesar такой функции не предусматривают в силу ограничений 1090ES.
По тому же пути идет и российский разработчик ООО "НПП "ЦРТС", предлагая малагабаритное устройство "Колибри", предполагающее работу в составе дорогстоящей МПСН "Альманах", активно продвигаемой ООО "ЦРТС" к внедрению в России.
Фактически для целей интеграции БВС могут быть использованы лишь три разрешенные в авиации технологии АЗН-В на базе ЛПД: 1090ES, UAT и VDL-4, но увы, не все они обладают равными возможностями.
Полноценная интеграция
Полноценная безопасная интеграция беспилотников в национальное воздушное пространство требует решения большого комплекса задач одновременно.
Вот основные из них:
1. Пилоты на борту ПВС и внешние пилоты БВС должны приборно, на своих мониторах наблюдать все воздушные суда поблизости заблаговременно до критического сближения.
То есть информация о местоположении должна передаваться не в одну, а в обе стороны между всеми бортами.
2. Взаимное наблюдение беспилотных и пилотируемых воздушных судов должно бесперебойно обеспечиваться во всех классах воздушного пространства, включая неконтролируемое.
По статистике в России 90% полетов БВС проходят в не обслуживаемом диспетчерами классе G на высоте 200-400 м.
3. Для решения задачи интеграции, взаимодействия БВС между собой, с пилотируемыми воздушными судами или с системой УВД могут быть использованы только сертифицированные ИКАО авиационные технологии.
Даже перспективный стандарт 5G, если его надежность и функции для авиации будут подтверждены испытаниями, не сможет быть применен для наблюдения воздушных судов до его признания ИКАО, что по оценкам экспертов займет не менее 10 лет в лучшем случае.
В настоящее время и среднесрочной перспективе для целей наблюдения могут рассматриваться лишь три стандарта АЗН-В и/или их возможные комбинации. Именно путем комбинирования идет США и Китай, используя распространенный 1090ES и более защищенный и функциональный UAT.
В России и Европе, как было сказано выше, для применения допустимы два стандарта 1090ES и VDL-4.
4. Все линии передачи данных между БВС, ПВС и диспетчером УВД должны быть максимально киберзащищены от возможного вмешательства в управление БВС, подмены навигационной информации, текстовых и голосовых сообщений.
5. Должны быть обеспечены информационные сервисы ситуационной осведомлённости, функции TIS-B, FIS-B, DGNSS, S&R, CPDLC, AOC и др.
Эксперимент с АЗН-В
Как и было заявлено на апрельской конференции по беспилотной авиации – технологиям брошен вызов доказать свою состоятельность в реальных условиях.
Из двух принявших вызов компаний, защищающих различные технологии, продемонстрировать работоспособность устройств АЗН-В VDL-4 смог только ГосНИИАС совместно с фирмой НИТА.
К сожалению, в демонстрации технологий не участвовала компания ЦРТС, но рекламируемое ею устройство АЗН-В «OUT» 1090 «Колибри», установленное на БВС «Птеро», все же было протестировано.
В совместных полетах на основе технологии АЗН-В VDL-4 приняли воздушные суда:
- Ан-2 Томского аэроклуба ДОСААФ России

- БВС «Птеро», компании ООО «Птеро»

- БВС «Стерх», компании ООО «ЭкоТрас»

- БВС «Микран», компании АО НПФ «Микран»

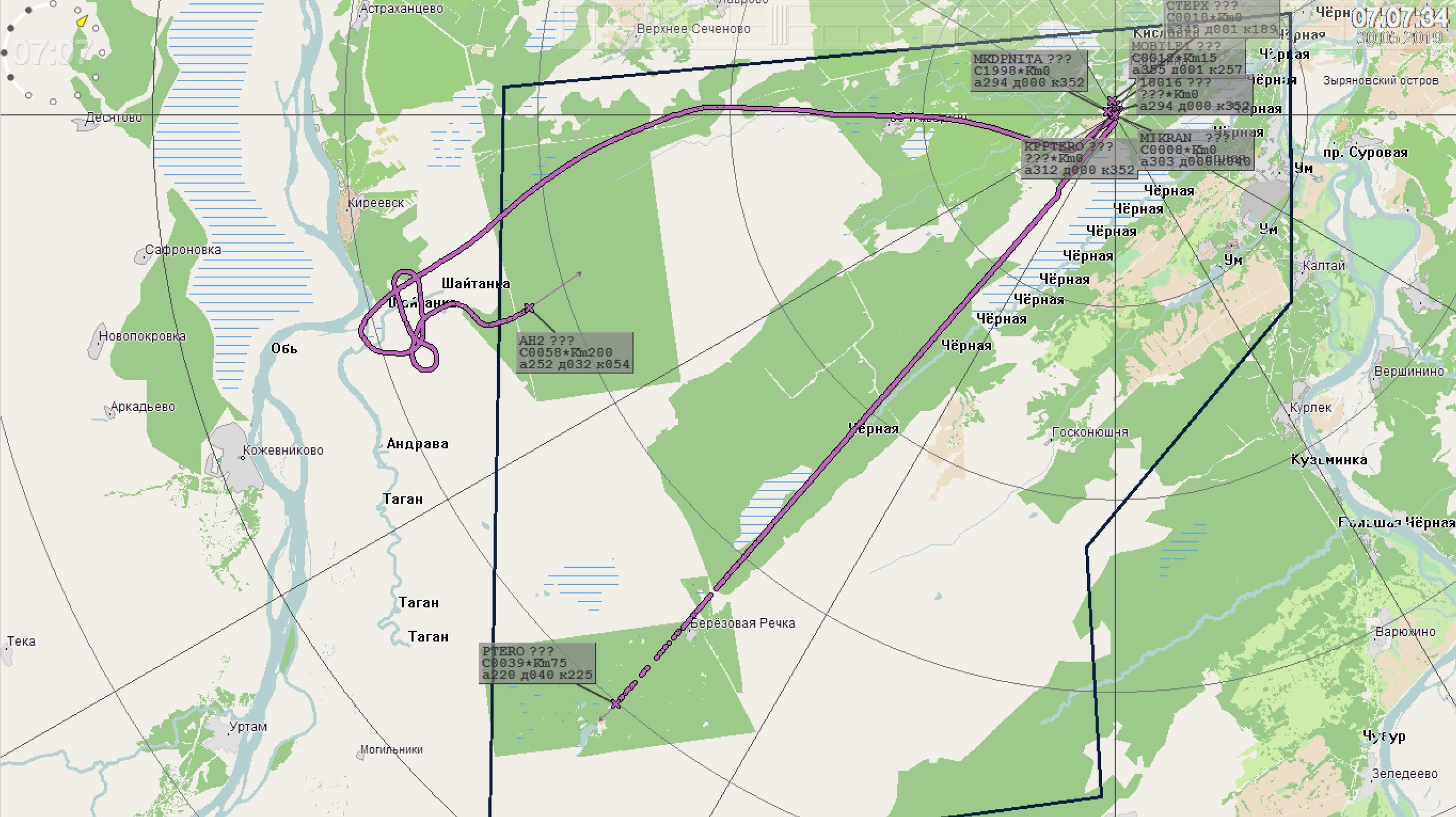
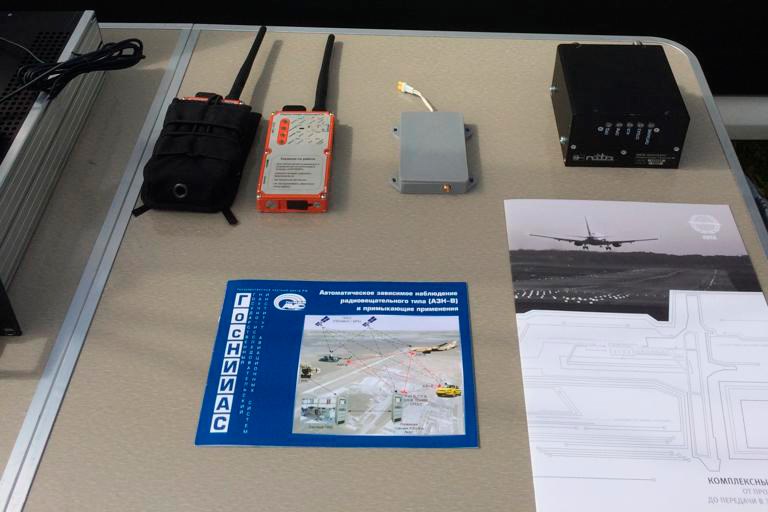
Все воздушные суда, участвующие в эксперименте были оснащены малогабаритным устройством АЗН-В VDL-4, масса которого составляет всего 55 грамм, которое в ходе эксперимента показало бесперебойное наблюдение БВС на удалении не менее 90 км.
Проверить дальность действия на большей дистанции не удалось в следствие ограничения размеров зоны воздушного пространства, закрытого для полетов.
Масса электронной начинки без корпуса составляет всего 25 грамм и имеет габариты 86х56х7 мм.
.jpg)
Дополнительно на БВС "ПТЕРО" было установлено устройство режима 1090ES "Колибри" производства ООО "НПП "ЦРТС" с массой электронной начинки 15 грамм, которое в ходе эксперимента показало бесперебойное наблюдение БВС на удалении не более 3 км.

Габариты устройства АЗН-В VDL-4 со встроенным GPS/ГЛОНАСС приемником наглядно можно представить по фотографии БВС "ПТЕРО" с открытым люком крыла. (белый модуль)

Рабочие места внешних пилотов БАС были также оснащены оборудованием АЗН-В VDL-4, что позволило обеспечить взаимное наблюдение всех воздушных судов в районе аэродрома.
Схематично взаимодействие участников эксперимента было организовано так, что каждый оборудованный объект получал и принимал сигналы от всех остальных участников эксперимента:
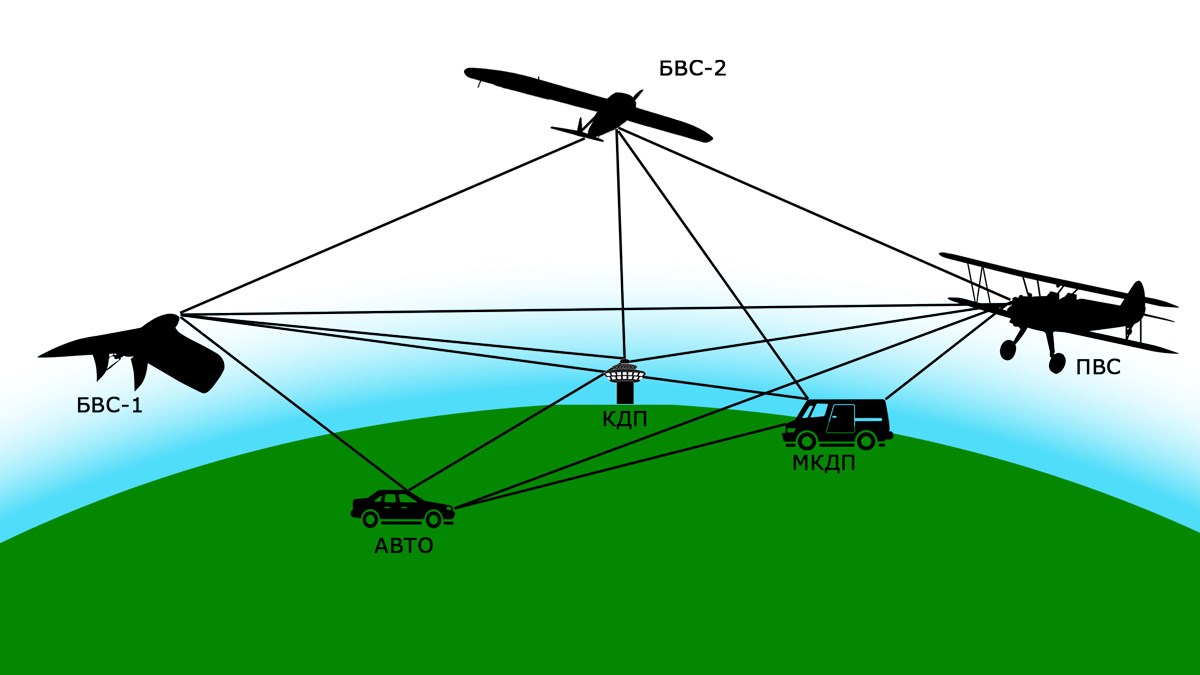
При этом каждая связь в сети была контролируема и конфиденциальна, а отключение любого из узлов не влияло на ситуационную осведомленность других.
В районе КДП аэродрома был развернут автономный мобильный диспетчерский командный пункт (МДКП) фирмы НИТА на основе микроавтобуса «Фольксваген», оборудованный АЗН-В VDL-4 и 1090ES.

Информация АЗН-В с МДКП транслировалась на многофункциональный индикатор (МФИ) непосредственно на рабочем месте руководителя полетов аэродрома.
За счет реализации функции TIS-B участники эксперимента обеспечивались информацией об обьектах, оснащенных АЗН-В не только формата VDL-4, но и 1090ES, включая рейсовые гражданские воздушные суда
АРМ Руководителя полетов
Планшет пилота АН-2
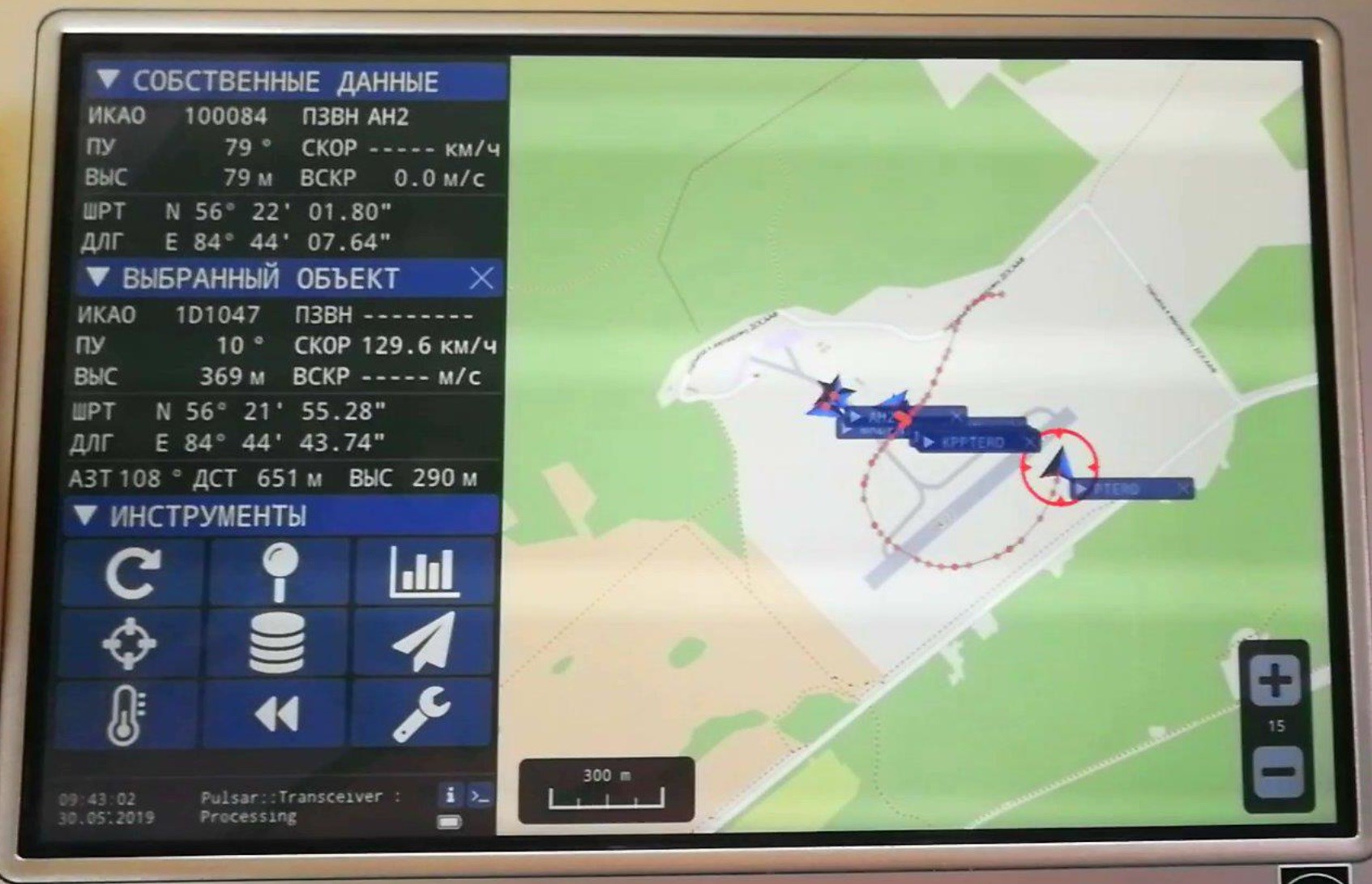
Наличие планшета обеспечивает предоставление экипажу/внешнему экипажу не только информации об окружающей воздушной обстановке, но и метеоинформации, принимаемой по каналу "земля-борт", а также обмен текстовыми сообщениями (CPDLC) в полете.

После взлета всех воздушных судов по территории аэродрома перемещался автомобиль, оснащенный АЗН-В, и имитировавший спецтранспорт.
Его местоположение по информации АЗН-В могли наблюдать не только РП аэродрома, но и непосредственно экипаж ВС/внешние экипажи БВС.
Габариты мобильного устройства АЗН-В VDL-4 на спецтранспорте 250х80х35 мм наглядно представлены на фотографии ниже (оранжевый модуль). Масса устройства 370 грамм. Устройство водонепроницаемо до глубины не менее 7 метров.
В период демонстрации технологии АЗН-В на аэродроме присутствовал Губернатор Томской области Сергей Жвачкин, представители Администрации Томской области, ведущих университетов г. Томска.

За ходом эксперимента наблюдало большое число заинтересованных представителей компаний эксплуатантов БАС, Госкорпорации по ОрВД, Росавиации, НИЦ им. Жуковского, ПАО «ИЛ», Роскосмоса, МЧС, представители крупных системных заказчиков, включая Лабораторию робототехники Сбербанка, при поддержке которой проходил весь конкурс «Авиароботех-2019».
Все участники эксперимента смогли убедиться, что в России существует технология, способная решить задачу безопасных полетов и интеграции БВС в общее воздушное пространство.
В ходе тестирования продемонстрировано и подтверждено:
- Все ВС/БВС инструментально наблюдаются на МФИ РП аэродрома в заданном районе полетов.
- Все ВС/БВС инструментально наблюдаются экипажем пилотируемого ВС в полете.
- Все ВС/БВС инструментально наблюдаются внешними экипажами БАС на земле на индивидуальных планшетах АЗН-В.
- При выполнении полета ВС/БВС, оборудованных устройством АЗН-В VDL-4, за пределами прямой радиовидимости инструментальное наблюдение таких ВС/БВС обеспечивается методом ретрансляции информации АЗН-В через находящееся в полете другое ВС/БВС.
- Все объекты, оборудованные устройством АЗН-В VDL-4 дистанционно идентифицированы, а канал управления может контролироваться руководителем полетов или иным лицом, обеспечивающим охрану специального объекта.
- Экипажи всех ВС, оснащенных АЗН-В VDL-4, получают информацию обо всех ВС, в том числе оснащенных только оборудованием АЗН-В 1090ES, находящихся в зоне ответственности ГРП аэродрома, в том числе с использованием информации TIS-B и методом ретрансляции.
- РП и Экипажи всех ВС, оснащенных АЗН-В VDL-4 Инструментально наблюдают перемещение по поверхности аэродрома наземного транспортного средства, оборудованного мобильным устройством АЗН-В.
- Все ВС/БВС – участники эксперимента наблюдаемы, управляемы и могут штатно маневрировать, выполняя команды РП через голосовую радиосвязь.
- Все экипажи ВС/БВС получают метеоинформацию о погоде (FIS-B) в районе полетов как в формате METAR, так и в формате текстовых сообщений.
- РП и экипажи ВС/БВС, оборудованные устройством АЗН-В VDL-4, имеют возможность обмена разовыми сообщениями (командами) по ЛПД АЗН-В.
- Возможность обмена конфиденциальной (закрытой) информацией между РП и экипажами ВС/БВС, оборудованными устройством АЗН-В VDL-4.
Выводы:
Полеты на основе технологии АЗН-В VDL-4 убедительно показали полный контроль воздушной обстановки, возможность дистанционной идентификации БВС и контроля канала управления при необходимости со стороны силовых структур, конфиденциальность и дополнительный функционал линии передачи данных.
Не смотря на объяснимые попытки иностранных авиационных гигантов влиять на российских чиновников и бизнес с целью сохранить монополию и контроль за всеми полетами воздушных гражданской авиации, увы, стандарт 1090ES и заоблачный по стоимости принцип МПСН не обеспечивает решения задач безопасности полетов и защиты информации, крайне актуальных с развитием беспилотной авиации.
Технически правильно идти по пути реализации устройств АЗН-В, обеспечивающих работу в двух типах ЛПД - 1090 и VDL-4, дополняющих друг друга и обеспечивающих максимальную функциональность и надежность.
Что важно, Авиароботех наглядно показал - по функциональным возможностям АЗН-В VDL-4 превосходит все альтернативные технологии, при этом не требует развертывания дорогостоящей наземной инфраструктуры и может работать даже в пустыне или Арктике, позволяя создавать защищенные самоорганизующиеся воздушные сети, за которыми и стоит будущее беспилотной авиации во всем мире!
Комментарии